本文最后更新于155 天前,其中的信息可能已经过时,如有错误请发送邮件到suzhech@gmail.com
题目背景
如果你了解什么是 PID 控制系统,请直接看一句话题面
夜深人静的实验室里,奇迹正在调试着使用 PID 系统控制的小车。苦恼于手动调参数却无法直观地看到系统的响应,奇迹想请你帮他编写一个模拟 PID 控制系统输出的程序。
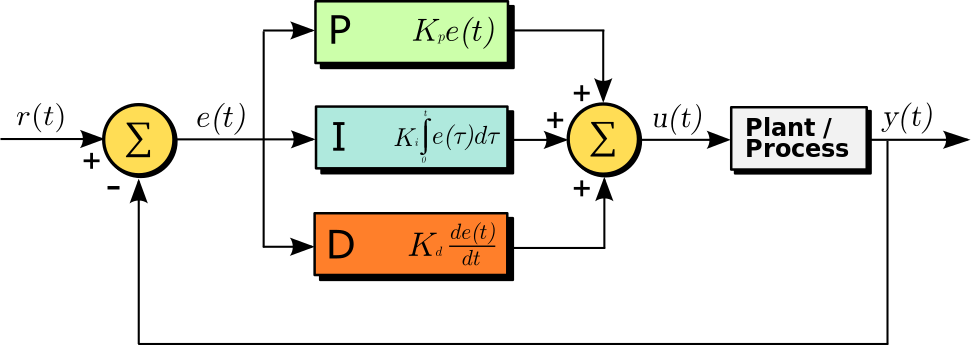
《自动控制原理》是很多学院的必修课,与如今的工程实际密切联系。有一种经典的控制方法被称为PID控制,即比例(Proportion)-积分(Integration)-微分(Differential)控制算法,它接受一个输入信号,通过对输入信号与输出信号的差值,即误差进行运算,并以此控制输出信号。
在本题中,我们设输入信号为固定值 Ui, 输出信号 Uo 初始时刻为零;通过对误差的比例与微分运算,更新输出信号的值。具体的系统方框图如下:
具体而言,为了把问题写成可迭代的离散模拟、便于编程实现,下面给出常用且明确的离散化约定:
- 用下标 k 表示离散时刻,初始时刻取为 k=0,且初值 Uo[0]=0。
- 误差在第 k 步定义为使用上一时刻的输出计算:e[k]=Ui−Uo[k−1].这样在计算第 k 步时所需的量均为已知值(避免出现等式左右同时包含 Uo[k] 的隐式情况)。
- 积分(累加)项取包含当前误差:S[k]=S[k−1]+e[k],初值 S[0]=e[0]=Ui−Uo[0]=Ui。
- 微分项采用差分:Δe[k]=e[k]−e[k−1]。
- 按上述定义,第 k 步的输出为:Uo[k]=kp⋅e[k]+kd⋅(e[k]−e[k−1])+ki⋅S[k]
按此迭代规则,从 k=1 到 k=t(共 t 步)依次计算并输出每个时刻的输出信号值即可(每行输出一个浮点数,保留三位小数)。
举例说明:若 Ui=10,且已知上一时刻 Uo(t−1)=6.5,则当前误差 e(t)=10−6.5=3.5;若累加和为 48,误差差分为 3.5−4.5=−1,则按上式计算得到
Uo(t)=3.5kp+(−1)kd+48ki.
题目描述(一句话)
给定阶跃信号 Ui,以及 PID 控制参数 kp,ki,kd,模拟并输出零初始条件系统在 t 个时刻的输出信号值。
输入
第一行四个浮点数 ui,kp,ki,kd
第二行一个整数 t,代表模拟总时刻数。保证 1≤t≤103。
输出
共 t 行,每行一个浮点数,代表当前时刻的输出信号值,保留三位小数。
输入样例
10 0.1 0.005 0.01
1000输出样例
1.050
0.979
1.043
1.080
...
9.903
9.903
9.904
9.904
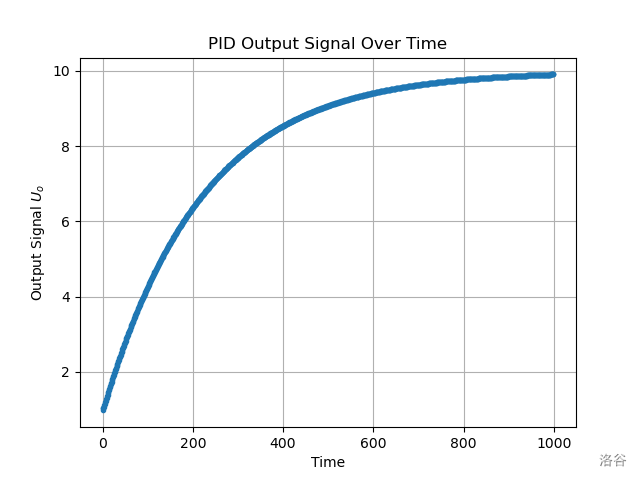
9.904Hint
样例输出的图像如下: